Identifying Solar PV from Aerial Imagery
Laurence Watson
Digimap GeoForum, March 2020
Co-founder at treebeard.io
Why do UK solar panels need locating?
Better forecasting

In the UK, better PV forecasts should save £1-10 million per year [1], and about 100,000 tonnes of CO2 per year.
Nowcasting
Source: Open Climate Fix
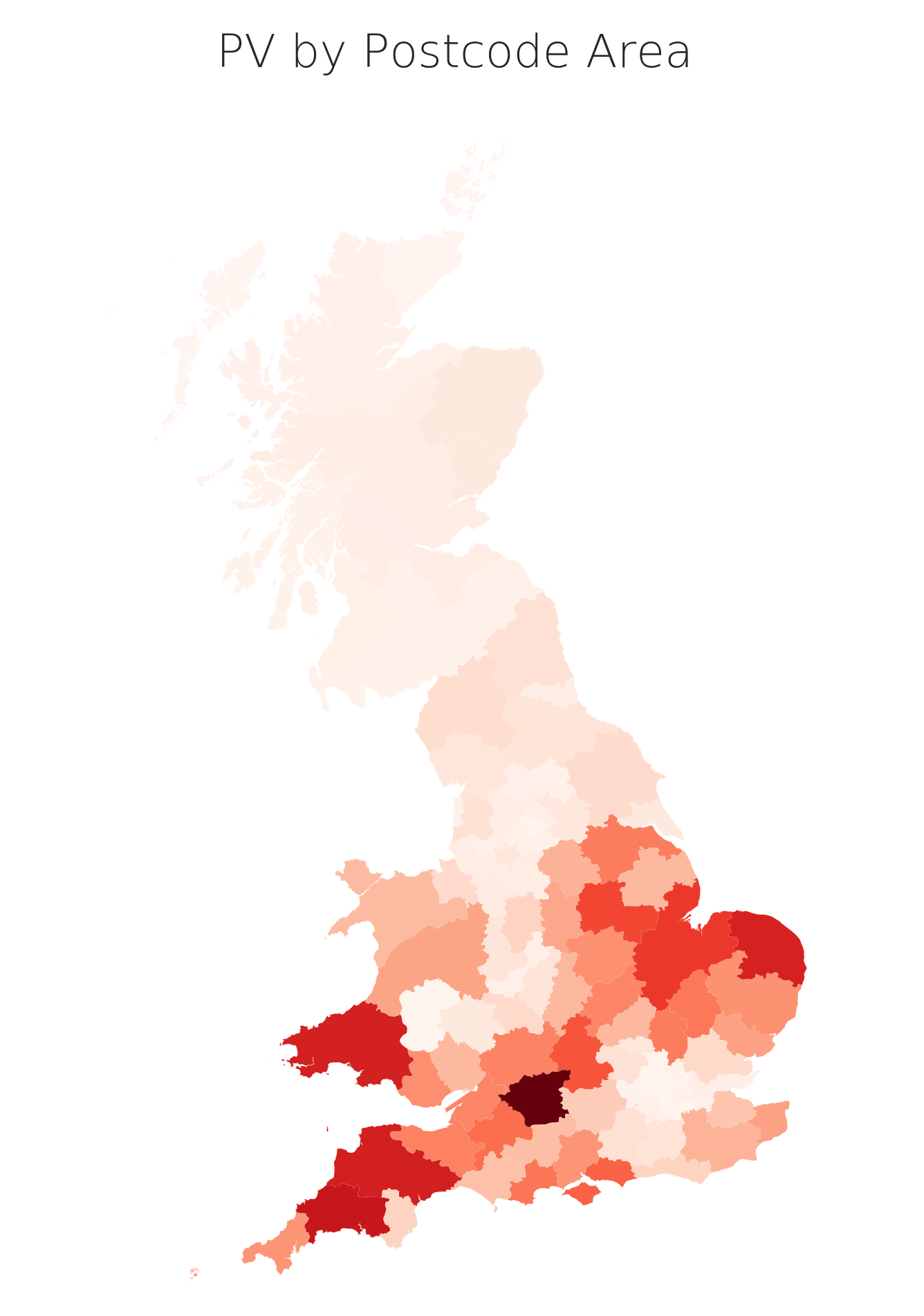
Don't we know where the PV is already?
My plan to
locate solar PV
- Get image data set of the UK
- Use Open Street Map labels for solar panels to create a training set
- Use neural networks for semantic segmentation on all images to find the rest of the panels
- Write up and relax
Semantic segmentation?
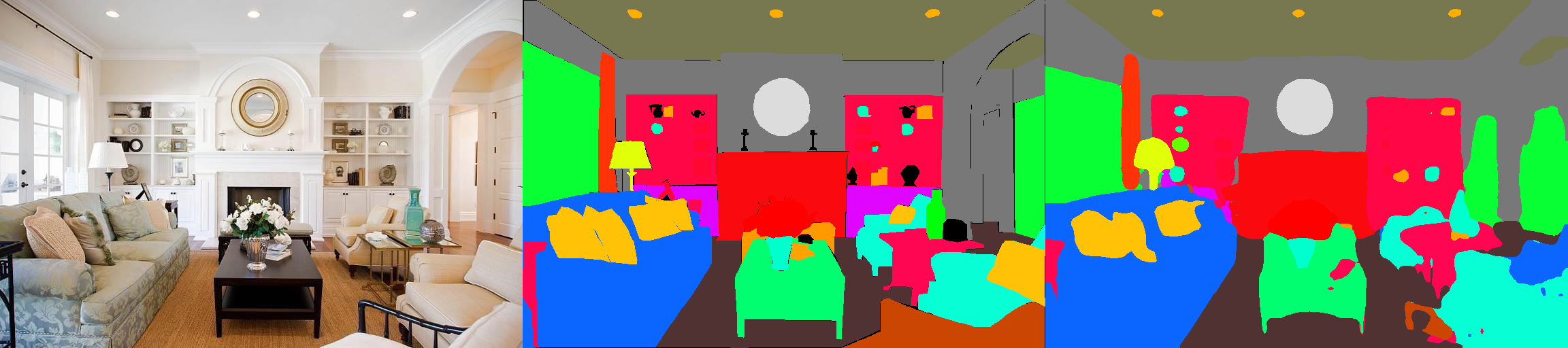
Image source: CSAIL
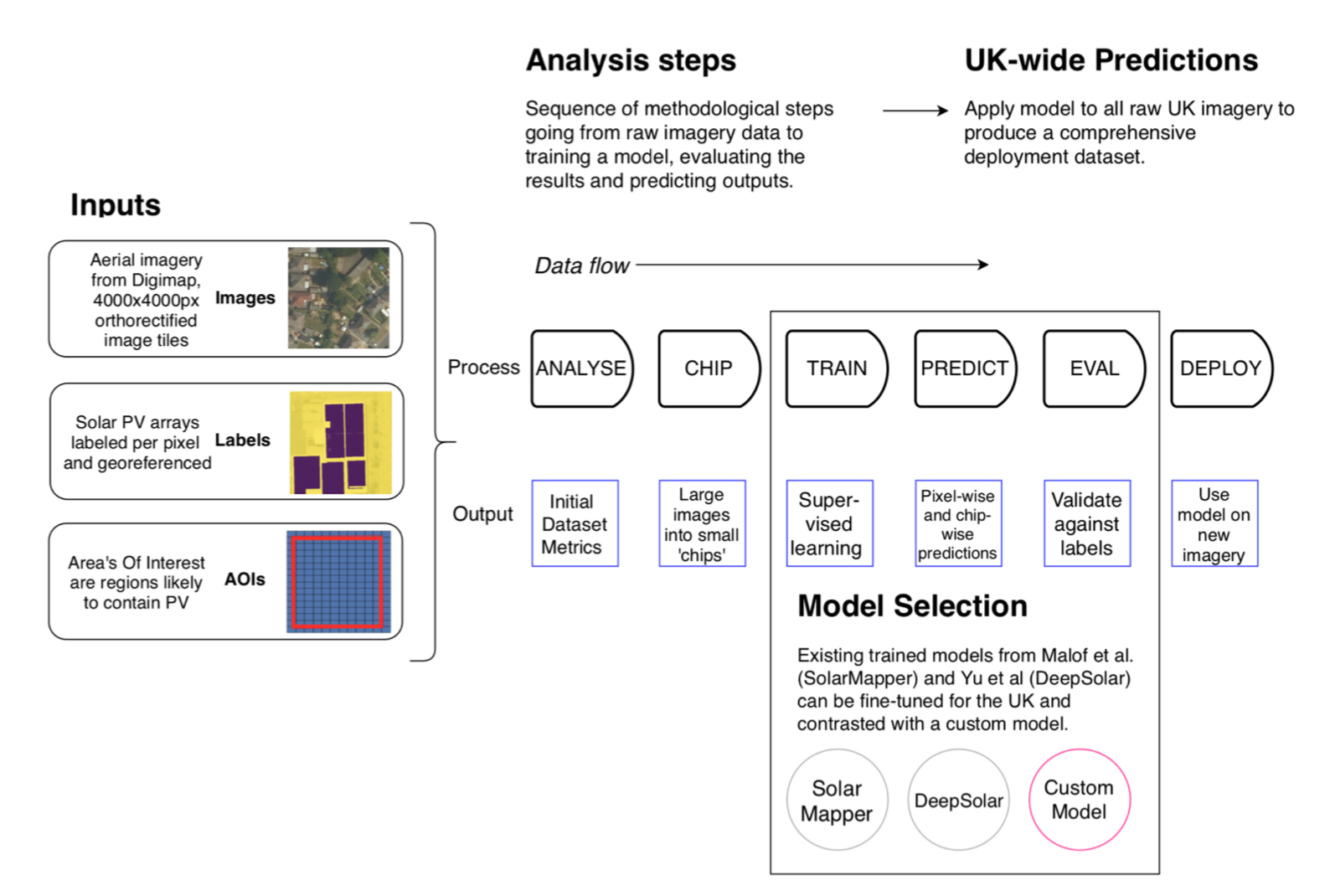
Workflow
Ok, but where is the data?
Enter Digimap!
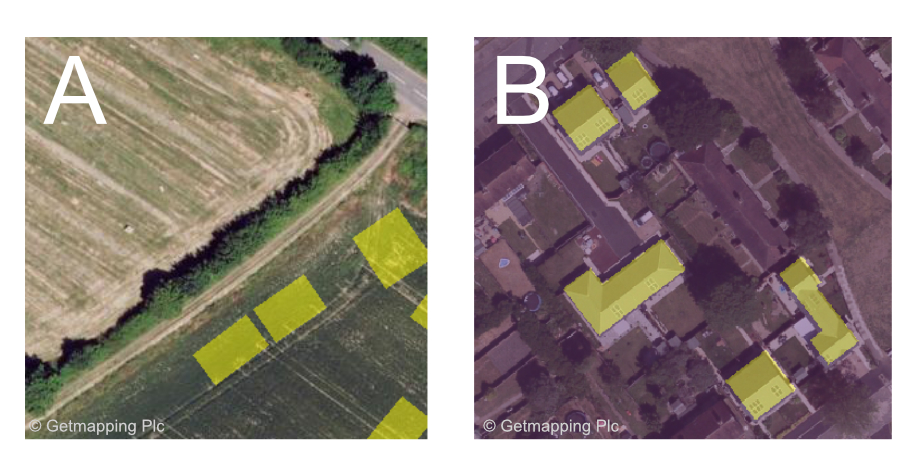
Aerial Digimap product, licensed from Getmapping plc.
25cm vertical ortho-photography
2TB of imagery data...
Thank you Digimap! 👏
Beautiful!
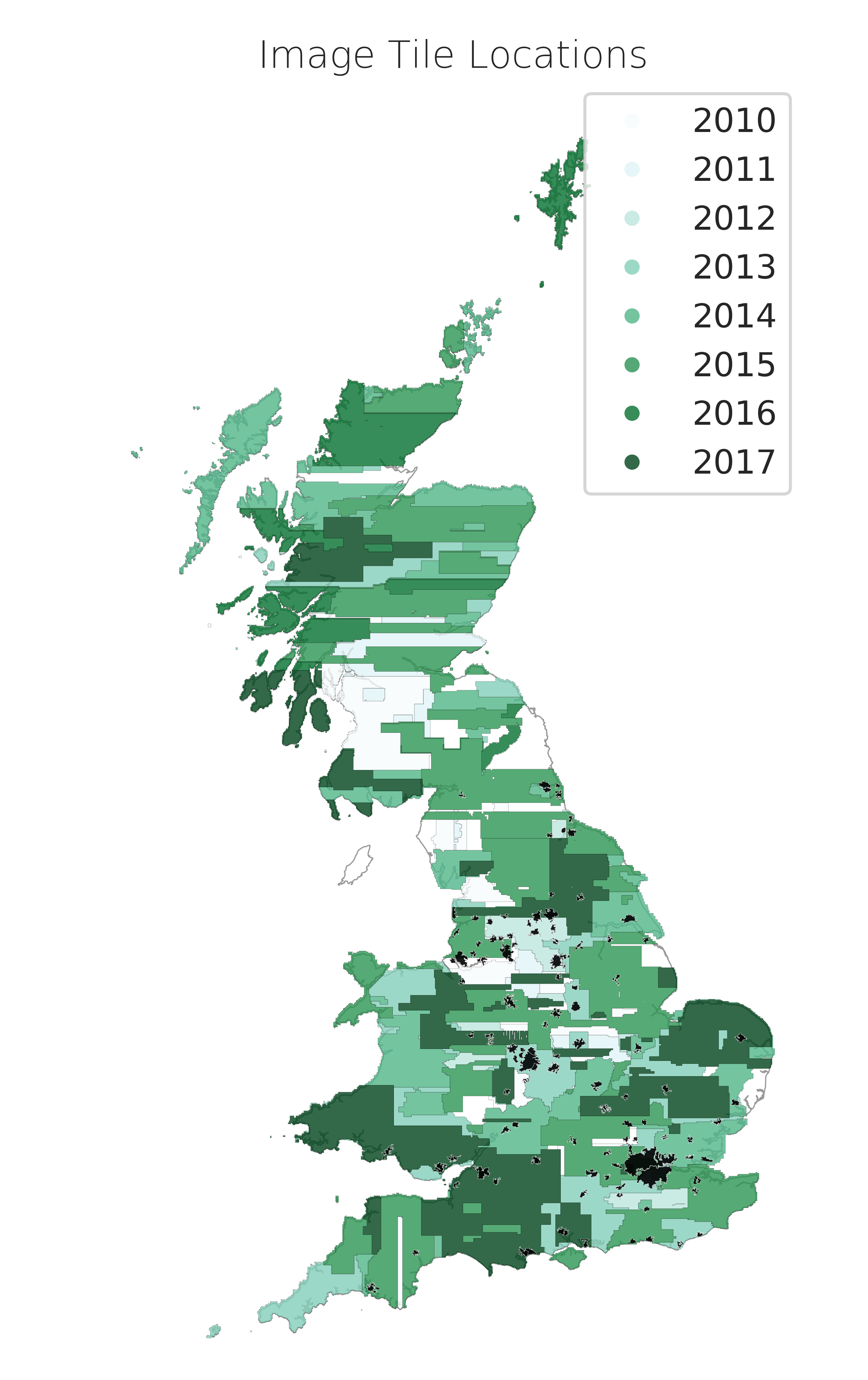
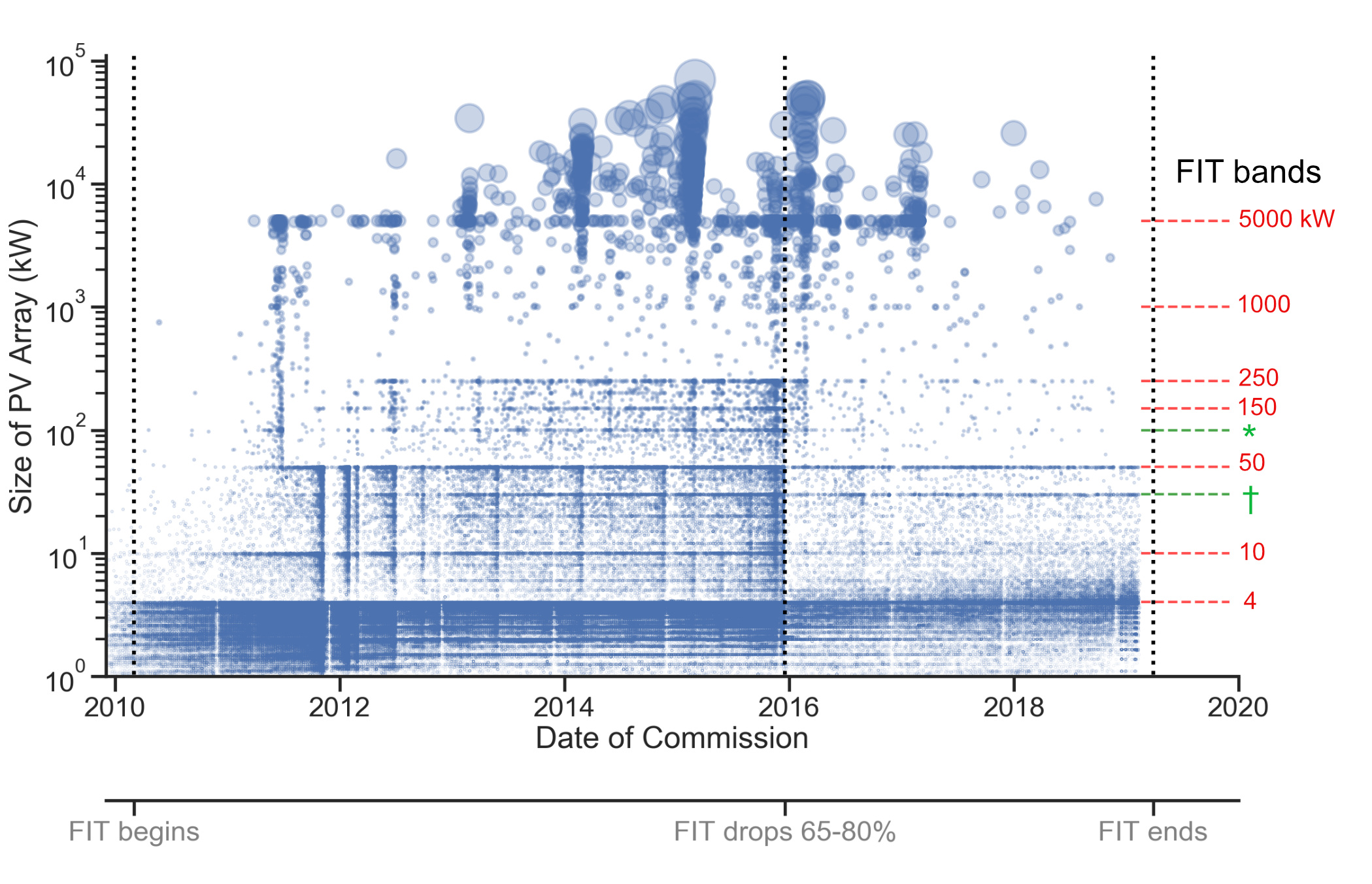
Image age
UK PV over time
Ok, but what about the labels?
Enter Open Street Map!
At the time, 15000 labels
Now... 100,000+ !

Tools (python based)
Heavy lifting
GeoPandas is an open source project to make working with geospatial data in python easier.
Access to geospatial raster data
Also useful:
shapely, pyproj, folium
All my code: https://github.com/Rabscuttler/esda-dissertation
Ok, how do I do semantic segmentation...?
Enter RasterVision
An open source framework for deep learning on satellite and aerial imagery.
Thank you Azavea 👏

How to use RasterVision
See my experiment script here: https://github.com/Rabscuttler/raster-vision/tree/master/code
Setup
- Docker image
- nvidia-docker requires Linux for GPUs
- Dependencies are a pain to manage otherwise
- GPUs mandatory - model runs can easily take 12hrs+ depending on experiment
Experiments
RasterVision takes on a lot of the work that would be reasonably boilerplate between geospatial analysis projects.
import rastervision as rv
##########################################
# Experiment
##########################################
class SolarExperimentSet(rv.ExperimentSet):
def exp_main(self, test=False):
# experiment goes here
Experiment Steps
- SETUP
- TASK
- BACKEND
- DATASET (TRAINING & VALIDATION)
- ANALYZE
- EXPERIMENT
Setup
# Connect docker filepath mounted to my data directory
base_uri = join(raw_uri, '/labels')
# Experiment label, used to label config files
exp_id = 'pv-detection-1'
# Number of times passing a batch of images through the model
num_steps = 1e5
batch_size = 8
# Specify whether or not to make debug chips (a zipped sample of png chips
# that you can examine to help debug the chipping process)
debug = True
# Split the data into training and validation sets:
# Randomize the order of all scene ids
random.seed(5678)
scene_ids = sorted(scene_ids)
random.shuffle(scene_ids)
# Figure out how many scenes make up 80% of the whole set
num_train_ids = round(len(scene_ids) * 0.8)
# Split the scene ids into training and validation lists
train_ids = scene_ids[0:num_train_ids]
val_ids = scene_ids[num_train_ids:]
Task
# ------------- TASK -------------
task = rv.TaskConfig.builder(rv.SEMANTIC_SEGMENTATION) \
.with_chip_size(300) \
.with_classes({
'pv': (1, 'yellow'),
'background': (2, 'black')
}) \
.with_chip_options(
chips_per_scene=50,
debug_chip_probability=0.1,
negative_survival_probability=1.0,
target_classes=[1],
target_count_threshold=1000) \
.build()
Backend
# # ------------- BACKEND -------------
backend = rv.BackendConfig.builder(rv.TF_DEEPLAB) \
.with_task(task) \
.with_debug(debug) \
.with_batch_size(num_steps) \
.with_num_steps(batch_size) \
.with_model_defaults(rv.MOBILENET_V2) \
.build()
# Make scenes to pass to the DataSetConfig builder.
def make_scene(id):
###
# Create lists of train and test scene configs
train_scenes = [make_scene(id) for id in train_ids]
val_scenes = [make_scene(id) for id in val_ids]
Dataset
# ------------- DATASET -------------
# Construct a DataSet config using the lists of train and
# validation scenes
dataset = rv.DatasetConfig.builder() \
.with_train_scenes(train_scenes) \
.with_validation_scenes(val_scenes) \
.build()
Analyze
# ------------- ANALYZE -------------
# We will need to convert this imagery from uint16 to uint8
# in order to use it. We specified that this conversion should take place
# when we built the train raster source but that process will require
# dataset-level statistics. To get these stats we need to create an
# analyzer.
analyzer = rv.AnalyzerConfig.builder(rv.STATS_ANALYZER) \
.build()
Experiment
# ------------- EXPERIMENT -------------
experiment = rv.ExperimentConfig.builder() \
.with_id(exp_id) \
.with_task(task) \
.with_backend(backend) \
.with_analyzer(analyzer) \
.with_dataset(dataset) \
.with_root_uri('/opt/data') \
.build()
return experiment
if __name__ == '__name__':
rv.main()
Run it!
Start up the docker container
docker run --runtime=nvidia --rm -it -p 6006:6006 \
-v ${RV_QUICKSTART_CODE_DIR}:/opt/src/code \
-v ${RV_QUICKSTART_EXP_DIR}:/opt/data \
quay.io/azavea/raster-vision:gpu-latest /bin/bash
Fire away
rastervision run local -p find_the_solar_pv.py
Pause

Recap
I want to identify solar PV from aerial imagery
- Image data from Aerial Digimap
- Training a model with 9,508 labels from Open Street Map
- Model is 'off-the-shelf' neural network
- Analysis pipeline, training and prediction with RasterVision
That would be too easy.
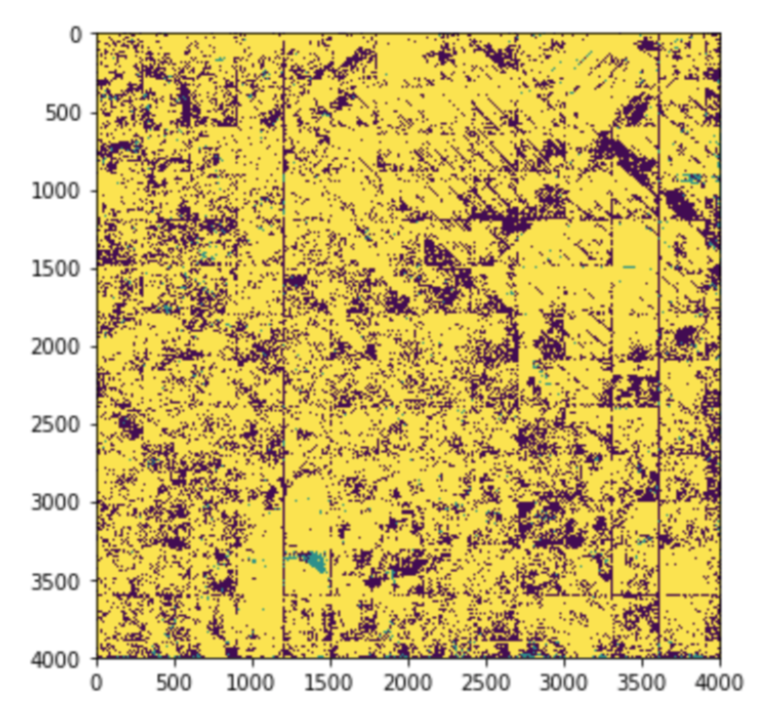
Creating a good training dataset is hard
Take two: train on an existing dataset
Bradbury, Kyle; Saboo, Raghav; Johnson, Timothy; Malof, Jordan; Devarajan, Arjun; Zhang, Wuming; et al. (2016): Full Collection: Distributed Solar Photovoltaic Array Location and Extent Data Set for Remote Sensing Object Identification. figshare. Collection. https://doi.org/10.6084/m9.figshare.c.3255643.v3
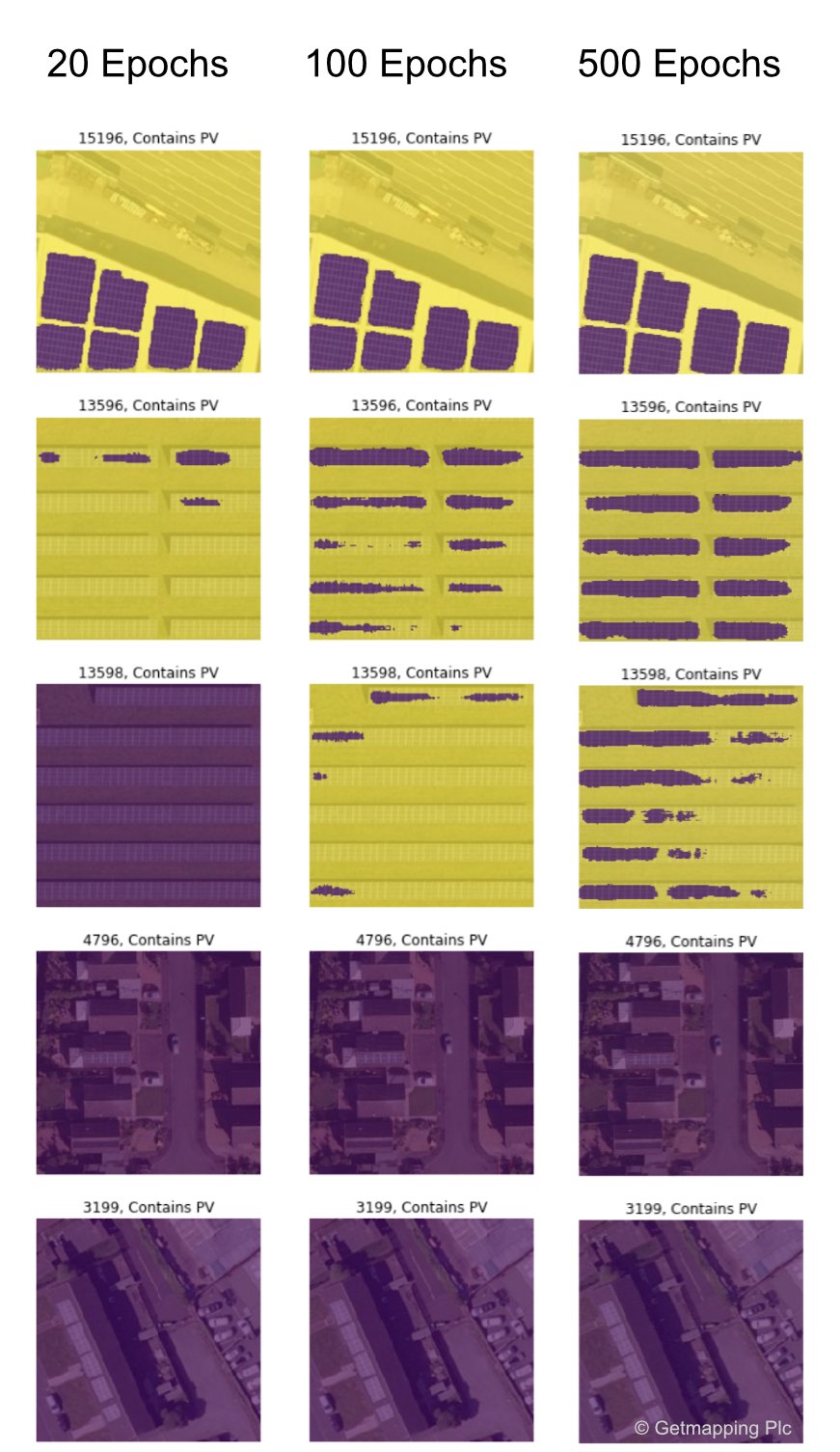
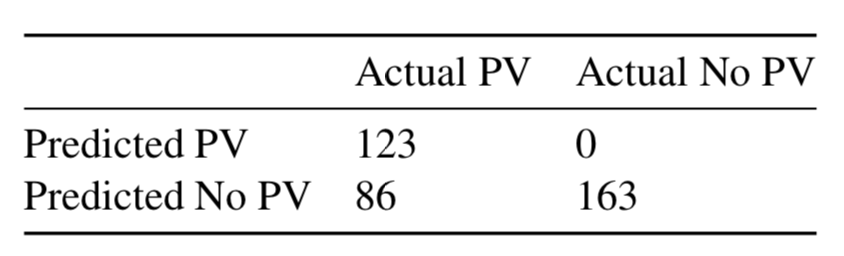
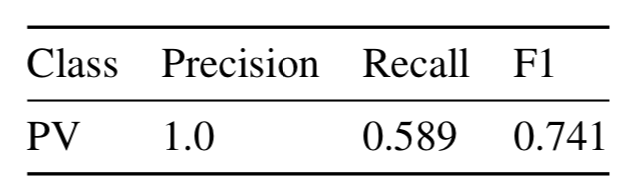
Predict on UK
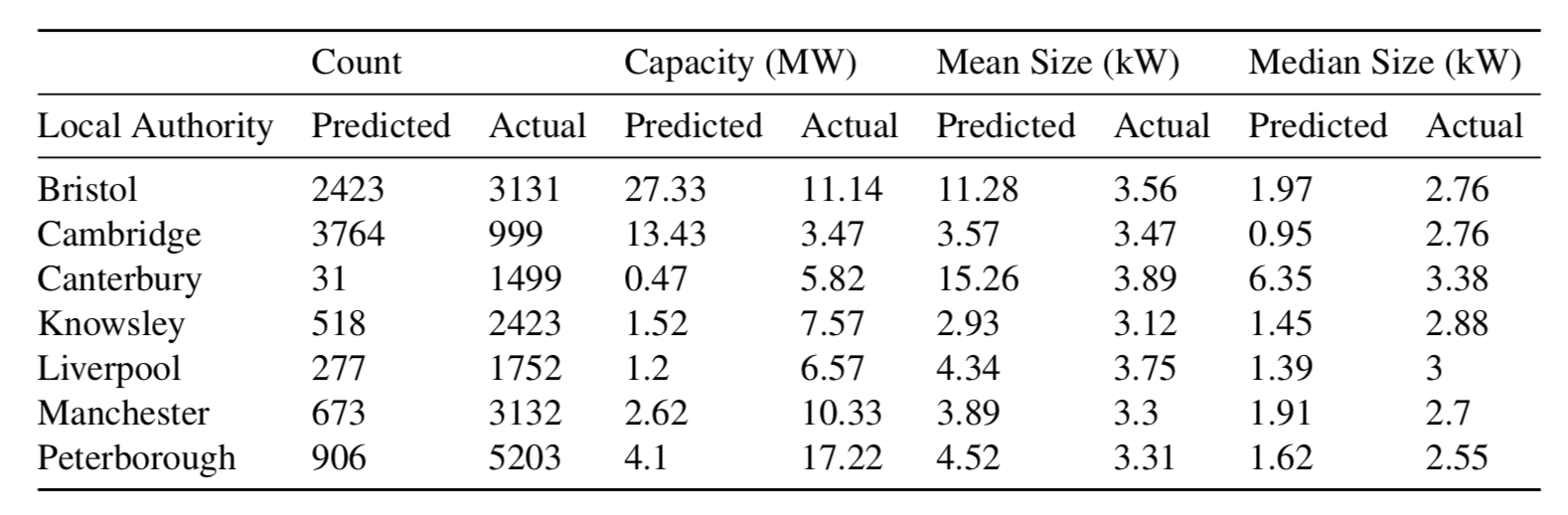
Results on a hand-selected UK set
That's nice, I want pictures
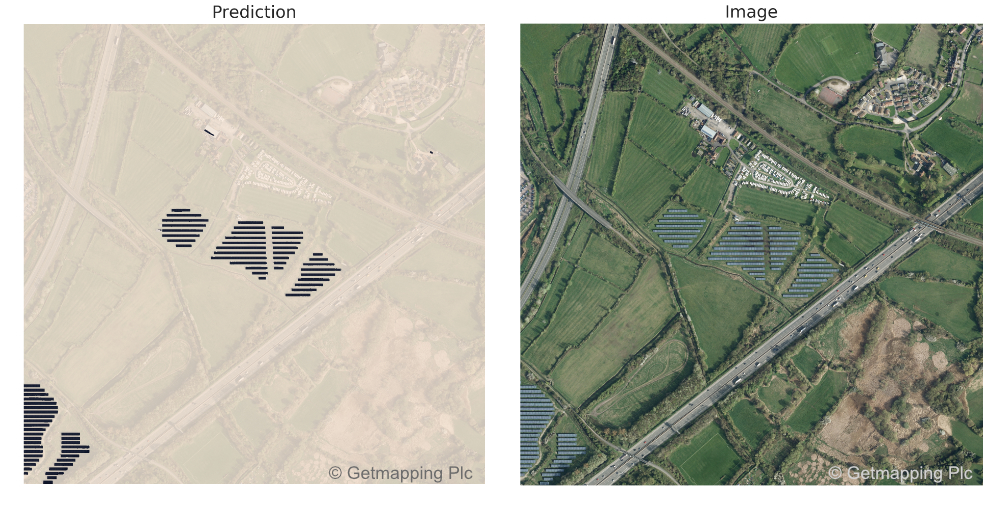
Urban predictions

Cambridge - lots of accurate predictions here.
Detail

Knowsley - some hit some miss But - some things like conservatories have not come up as false positives.
False positives

Bristol docks confused the model
Concluding remarks
Aerial DigiMap is a great product, suitable for deep learning and computer vision experiments.
OS boundaries also very useful.
Lots of interesting LIDAR data which I considered
Could imagery products be made more easily available?
Interesting projects at UCL
London Building Stock Model, seminar on 7th April, UCL Energy Institute

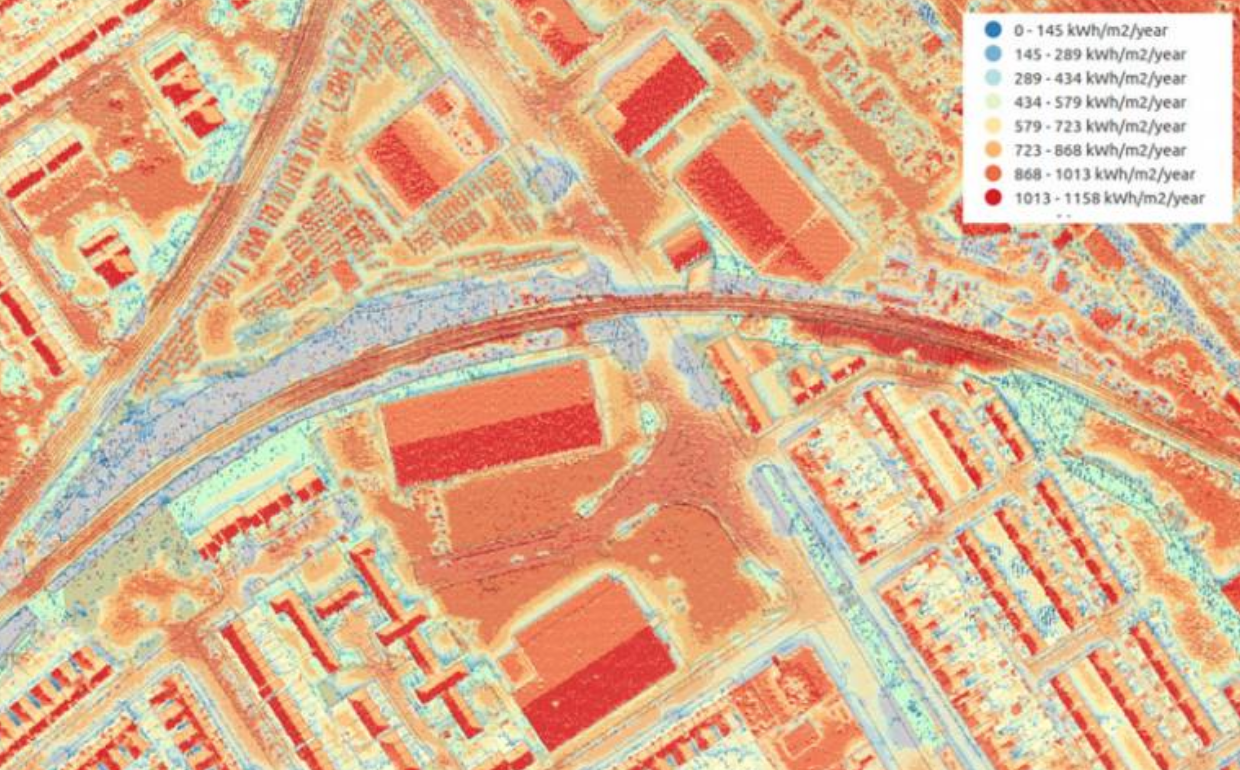
London Solar Opportunity Map
Thank you
I'm building tools for reproducible data science at treebeard.io
If you're a data scientist / analyst - I want to hear from you!
Say hi: laurence@treebeard.io
Twit: @LaurenceWWatson
Code
Data wrangling: https://github.com/Rabscuttler/esda-dissertation
RasterVision scripts: https://github.com/Rabscuttler/raster-vision/tree/master/code